When I wrote these pages, I had some vague idea that at some point in the future I might make some hind-hooves to go with the hand-hooves. Sadly, this never actually happened, but I've had a large amount of mail over the last decade asking me about how I would do it. Well, these are musings only, but here are some of the things to think about.
Comfort
The human foot is a surprisingly fragile part of the body, especially us soft types who wear shoes, socks, slippers, and walk around on carpeted floors. With the weight of the body pushing down on them, there's quite a strain. Feet are evolved to take this strain, but only in one way: in a standing position, the weight of the body is evenly distributed so as to minimise stress. Makers of footwear have to take this into account: the foot can very easily become deformed or injured if this principle is ignored. This is why it is so vital to take extra care when purchasing shoes for children. The longer you intend to wear these hooves, the more critical this becomes. As part of a fur-suit, you might possibly wear these all day at a convention: you don't want them to become agony after twenty minutes.
Consequently, the most important thing about hind hooves is that they fit your feet well and comfortably. Whilst we will be fine to emulate the hand-hooves cosmetically, it won't do to just push our feet into them like we did our hands. To this end, I'd purchase some footwear to build our hooves around, so as to protect the feet. Plimsoles would probably be good: rubber soles and toe caps which adhesive will stick to well, and which don't have thick heels to get in the way and spoil the look of things.
Digitigrade Posture
Almost all quadrupeds support their hind-weight with their rear legs in what is known as a digitigrade position. That is, in order to emulate it, we would have to stand on our toes: the weight is bourn on our digits. Us awkward humans however, have evolved for upright, plantigrade motion: we walk with our heels and the flat of our feet in contact with the ground: this maximises the weight-bearing ability of our feet, because we put all of our weight onto two feet instead of sensibly sharing the load over four. We chose weight over speed: the digitigrade structure is much better suited to running.
This presents us with a small problem: we could design a cosmetic hoof and simply build it around the toes of a shoe, but that wouldn't emulate a horse's foot very well. Can we mimic a digitigrade leg?
As you can see from Fig 1, digitigrades have evolved a much longer "foot" than us: simply adopting a tip-toe posture won't work. There are two work-arounds we can do. Either we can add padding to suggest a digitigrade structure (similar to the shaded areas on the human leg in Fig 1), or we can come up with prosthetics. The padding creates a relatively thin illusion: the joints are still human, and movement will look wrong, but this is a relatively simple and cheap way of proceeding, and will probably do the job, especially if you're playing a horse-morph and wearing clothing over the top.
|
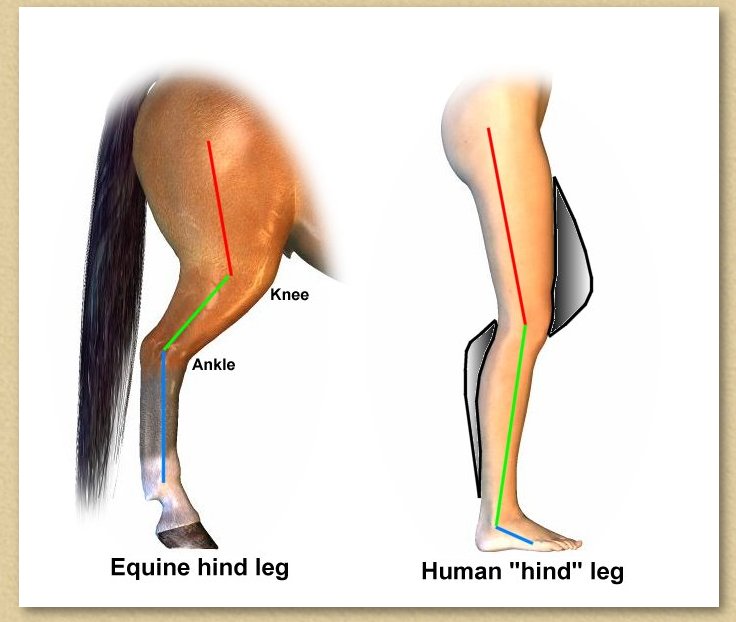
Fig 1
|
Prosthetics are beyond my humble skills, but a lot of people have successfully tackled the idea. Some of the rigs created by the big-league special-effects companies are amazing, but perhaps even more impressive is what can be achieved on the kind of budget most of us have to play with (ie: what have I got lying around the shed?). A good example is a werewolf rig created by Gryphern and very conveniently YouTubed. Do a search under "digitigrade stilts" and "digitigrade fursuit" and you are sure to find results.
Also well worth a visit are Lilleah West's amazing quadruped fursuits.
|

